Unlocking the Future: Mastering 3D Object Recognition & Pose Estimation with Computer Vision
Have you ever wondered how robots can pick up objects with such incredible precision? Or how augmented reality apps seamlessly place virtual furniture in your room? The magic behind these innovations lies in 3D object recognition and pose estimation – technologies that are revolutionizing everything from industrial automation to mobile gaming.
As someone who’s spent years working with computer vision systems, I’m excited to break down these complex concepts into digestible pieces. Let’s dive into the fascinating world of 3D perception and discover how machines understand the physical world around them.
Understanding the Basics: What is 3D Object Recognition?
At its core, 3D object recognition is like teaching a computer to “see” and understand objects the way we humans do. When you look at a coffee mug, you instantly recognize it regardless of its position or angle. But for a computer, this seemingly simple task requires sophisticated algorithms and deep learning models.
The process involves:
Capturing the scene through sensors (cameras, depth sensors, or LiDAR)
Processing the raw data to extract meaningful features
Matching these features against known object models
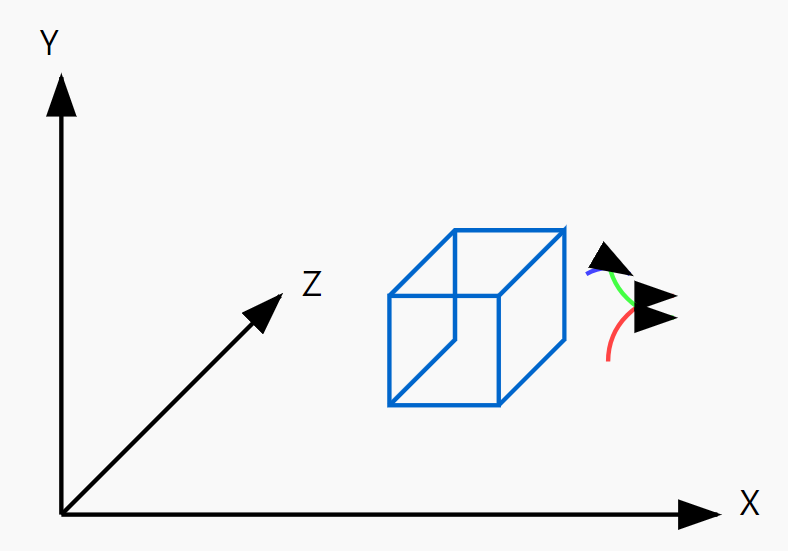
Determining the object’s position and orientation in 3D space
The Power of Pose Estimation
Pose estimation refers to determining the position and orientation of an object in a 3D space. This is crucial for applications where machines need to interact with physical objects, such as robotic arms, self-driving cars, and virtual reality (VR).
Key Components
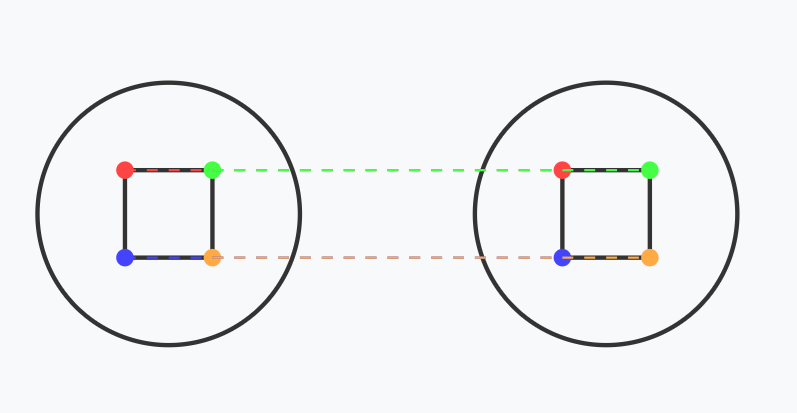
Keypoint Detection: Identifies critical points on an object.
Coordinate Mapping: Converts detected keypoints into a 3D coordinate system.
Angle Estimation: Computes the object’s orientation relative to the camera or sensor.
Popular pose estimation algorithms include:
OpenPose & DeepPose: Used for human pose estimation.
PoseCNN: Ideal for estimating the pose of objects in cluttered environments.
PVNet & DensePose: Advanced methods for fine-grained object and human pose estimation.
Key Technologies Driving 3D Recognition
Point Cloud Processing
Modern 3D vision systems often work with point clouds – collections of points in 3D space that represent an object’s surface. These points are captured using depth sensors or reconstructed from multiple 2D images. The challenge lies in processing these massive datasets efficiently while extracting meaningful features.
Deep Learning Architectures
The field has been transformed by deep learning, particularly through architectures like:
PointNet and PointNet++ for direct point cloud processing
3D convolutional neural networks for volumetric data
Multi-view convolutional networks that combine multiple 2D perspectives
Feature Matching and Registration
For precise pose estimation, we need robust feature matching algorithms that can handle:
Partial occlusions
Varying lighting conditions
Different scales and rotations
Real-time processing requirements
Real-World Applications
The impact of 3D object recognition and pose estimation extends far beyond robotics:
Industrial Automation
Manufacturing plants use these technologies for:
Bin picking and assembly line automation
Quality control and inspection
Inventory management
Worker safety monitoring
Augmented Reality
The gaming and retail industries leverage 3D recognition for:
Virtual furniture placement
Interactive gaming experiences
Virtual try-on solutions
Navigation and spatial computing
Autonomous Vehicles
Self-driving cars rely on these systems for:
Obstacle detection and avoidance
Traffic sign recognition
Parking assistance
Environmental mapping
Medical Imaging & Surgery
Surgeons utilize pose estimation for precise robotic-assisted surgeries and advanced diagnostic imaging.
Getting Started with 3D Object Recognition
If you’re interested in experimenting with these technologies, here are some resources to get started:
1. Open-Source Libraries
Open3D for point cloud processing
PyTorch3D for deep learning
OpenCV for computer vision basics
2. Development Tools
ROS (Robot Operating System) for robotics applications
Unity or Unreal Engine for AR development
Python with NumPy for mathematical operations
Top Deep Learning Models for 3D Object Recognition & Pose Estimation
If you’re a machine learning enthusiast or data scientist, here are some state-of-the-art models you should explore:
PointNet & PointNet++ – Directly process raw point clouds for object recognition.
YOLOv7-Pose – Real-time object detection and pose estimation.
DensePose – Human body pose estimation.
PoseCNN – Robust object pose estimation in complex environments.
DeepIM – Used for iterative refinement of object poses in robotic applications.
Future Trends and Challenges
As we look ahead, several exciting developments are shaping the field:
Emerging Opportunities
Edge computing for faster processing
Integration with 5G networks
Improved sensor technologies
Neural radiance fields (NeRF) for 3D reconstruction
Ongoing Challenges
Handling transparent and reflective objects
Dealing with dynamic scenes
Reducing computational requirements
Improving accuracy in challenging environments
While 3D object recognition and pose estimation are advancing rapidly, some challenges remain:
High computational cost – Processing 3D data requires significant resources.
Occlusion issues – Objects blocked by others can reduce accuracy.
Data scarcity – Large-scale 3D datasets are limited compared to 2D images.
However, future trends such as self-supervised learning, transformer-based models, and edge AI will significantly enhance the performance and efficiency of these technologies.
Conclusion
3D object recognition and pose estimation are foundational technologies driving innovation across industries. As sensors become more affordable and algorithms more sophisticated, we’ll continue to see new and exciting applications emerge.
Whether you’re a developer, researcher, or industry professional, understanding these technologies is crucial for staying ahead in the rapidly evolving field of computer vision.